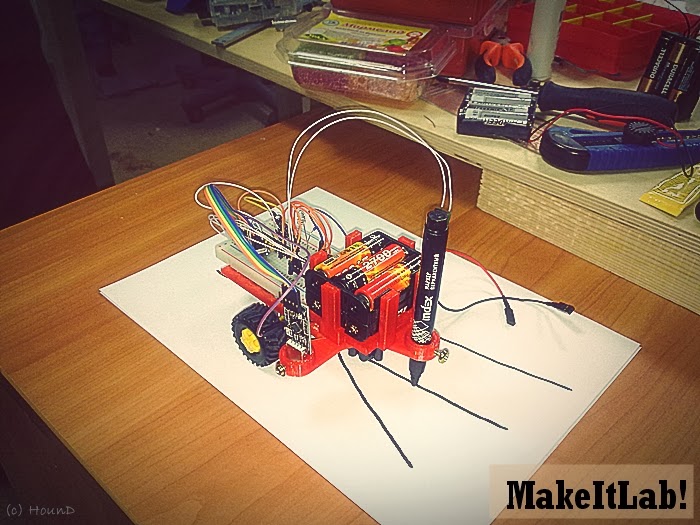
Йоу! Продолжаем нашу работу с Drawbot'ом - пошаговые инструкции )) Итак, я сконструировал крепления для аккумуляторов, собрал всё и получил следующую конструкцию:
 После чего я приклеил плату с аналогом Ардуинки:
После чего я приклеил плату с аналогом Ардуинки:
 Поставил аккумы:
Поставил аккумы:
 А теперь заливаем самую простую тестовую прогу (машинка будет ехать прямо и мигать диодом).
А теперь заливаем самую простую тестовую прогу (машинка будет ехать прямо и мигать диодом).
 Далее я хочу сделать следующее - подружить Drawbot с Matlab'ом, чтобы он умел рисовать любые функции. Дружить Ардуинку и Матлаб я знаю как, теперь будем писать софт для нашего робота-художника )))
Далее я хочу сделать следующее - подружить Drawbot с Matlab'ом, чтобы он умел рисовать любые функции. Дружить Ардуинку и Матлаб я знаю как, теперь будем писать софт для нашего робота-художника )))



Проверяем, как всё работает )))
int m1FPin = 7;
int m1BPin = 11;
int m2FPin = 10;
int m2BPin = 9;
int sens_raw;
const byte DIR_FORWARD = 0;
const byte DIR_BACKWARD = 1;
const byte DIR_LEFT = 2;
const byte DIR_RIGHT = 3;
const byte DIR_STOP = 4;
void walkDir( byte dir ){
if( dir==DIR_FORWARD ){
analogWrite( m1FPin, 0 );
analogWrite( m1BPin, 50 );
analogWrite( m2FPin, 0 );
analogWrite( m2BPin, 50 );
}
else if( dir==DIR_LEFT ){
analogWrite( m1FPin, HIGH );
analogWrite( m1BPin, LOW );
analogWrite( m2FPin, LOW );
analogWrite( m2BPin, HIGH );
}
else if( dir==DIR_STOP ){
analogWrite( m1FPin, LOW );
analogWrite( m1BPin, LOW );
analogWrite( m2FPin, LOW );
analogWrite( m2BPin, LOW );
}
}
int led = 13;
// the setup routine runs once when you press reset:
void setup() {
// initialize the digital pin as an output.
pinMode(led, OUTPUT);
}
// the loop routine runs over and over again forever:
void loop() {
walkDir( DIR_FORWARD );
digitalWrite(led, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(led, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
// Serial.print(sens_raw);
// delay(500);
}
Вот видяшка нашего тест-драйва Drawbot_v1 :DDDDDDDDDDDD На фоне - руки Олега, мой ржач и озвучка Стаса :DDDDD



















